1.15. 地磁计和指南针¶
望文生义,地磁计就是利用传感器测量地球磁场的方法来确定物体水平方向(与地面垂直的方向)上的朝向。我们四大发明之一的指南针正是 利用地球磁场的原理,古代人们就已发现地球是一个很大的磁铁,而且南北极朝向南北极始终保持不变,周围无更强磁场的小磁铁受到地磁 方向的影响也始终朝向一个固定的方向。指南针的小磁极的指向始终保持不变,这样就可以帮助我们确定正确的方向,指南针诞生后对大航海 时代的发展起到积极推进作用,那个时代在海上行船全靠指南针(罗盘)和北斗星的指引,他们都具有始终不变的方向。
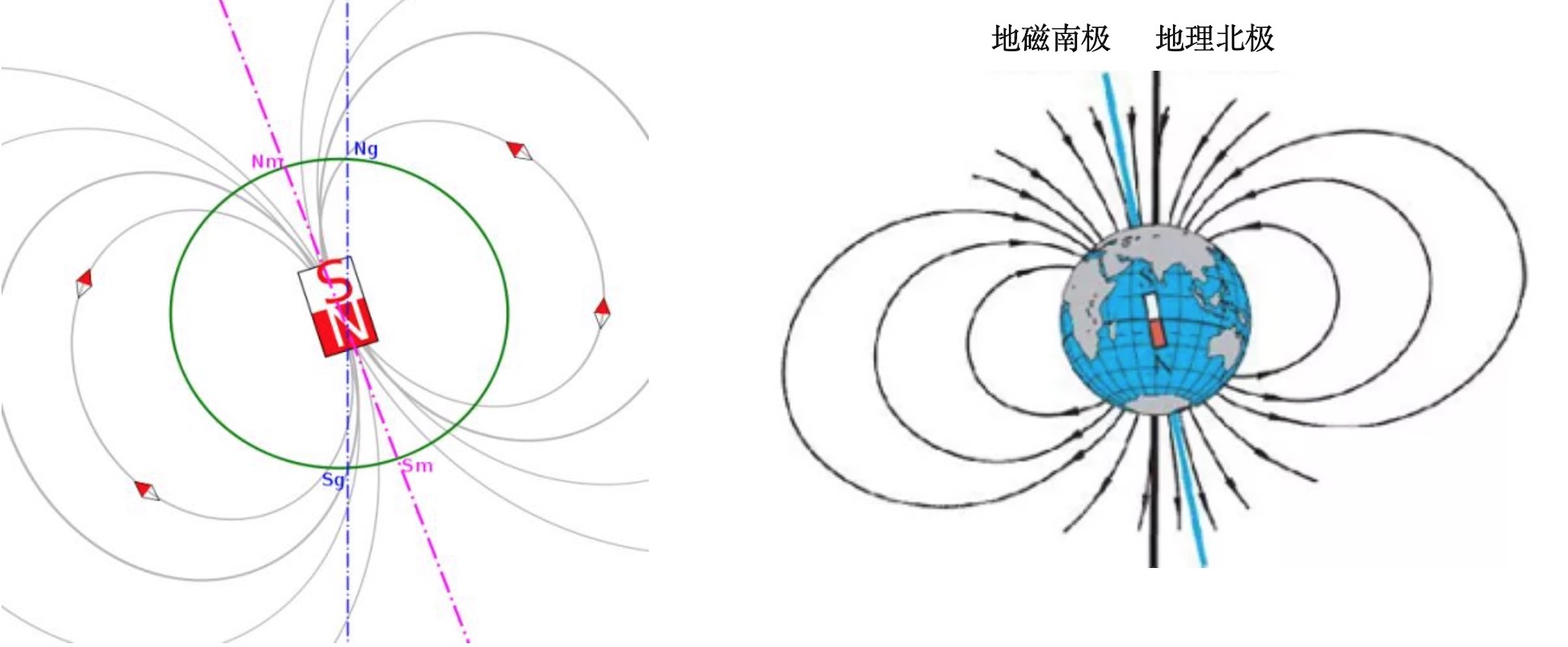
今天我们知道地球磁场并不稳定,甚至有科学预言,地球磁极会发生翻转。地磁南北极与地球南北极并不一致,如下图所示,他们方向相反, 而且两对极点连线之间存在夹角。
1.15.1. 地磁计的数据¶
使用下面的程序示例,观察地磁计数据的变化规律。示例程序如下:
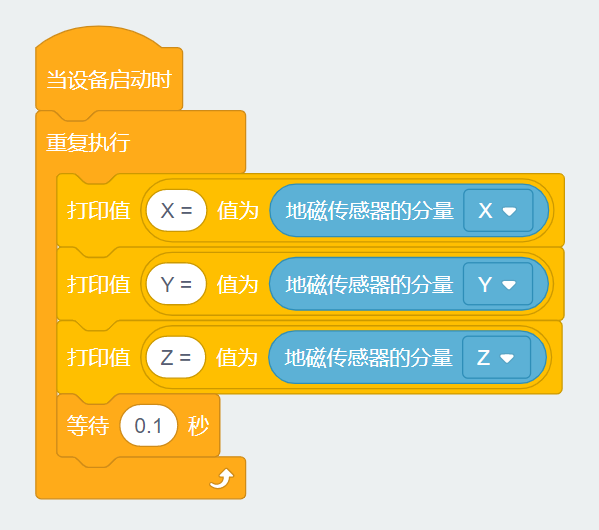
将本示例程序保存到BlueFi的/CIRCUITPY/code.py文件中,当BlueFi执行示例程序时,旋转BlueFi并观察地磁计给出的三个分量数值的变化。
示例代码分析:
- 第1行,初始化程序,相当与程序下载进Bluefi之后告知Bluefi从此开始执行程序
- 第2行,一个无穷循环的程序块
- 第3行(无穷循环程序块的第1行),打印值”X=”,将地磁传感器的分量X打印出来
- 第4行(无穷循环程序块的第2行),打印值”Y=”,将地磁传感器的分量Y打印出来
- 第5行(无穷循环程序块的第3行),打印值”Z=”,将地磁传感器的分量Z打印出来
- 第6行(无穷循环程序块的第4行),等待0.1秒(即系统空操作0.1秒)
通过本示例的数据信息,你观察到地磁计的数据与BlueFi的姿态和朝向之间存在什么样的关系?
1.15.2. 指北针和电子罗盘¶
我们修改前一个示例,增加北方的指示,我们以BlueFi金手指的方向为准,当BlueFi的LCD显示器保持与地水平面平行时, 金手指对着正北方时地磁计指北针归零,旋转BlueFi过程中,将给出BlueFi的金手指水平方向与正北方的夹角。示例程序如下:
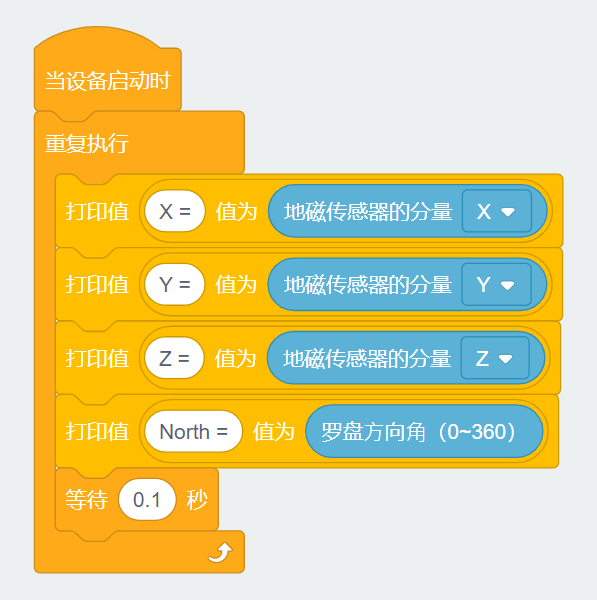
在前一个示例的基础上,把罗盘方向角也打印出来。
现在你知道为什么指南针并不指向南方而是指向北方的原因了吗?
总结:
- 地球磁场
- 地磁南北极和地理南北极
- 地磁计
- 指南针
- 本节中,你总计完成了13行代码的编写工作
重要
出现的代码块
- 地磁传感器的分量(每个分量的有效值: -10.24~+10.24),地磁计的三个分量值 x方向分量、y方向分量、z方向分量
- 罗盘方向角(有效值: 0~359), 给出当前方向与正北方向的夹角